
سلام،
و اکنون اگر "دقیقاً" (در صورت امکان) پیکربندی سطح شیب دار خود را در ابزار شبیه سازی وارد کنید ، آیا نتایج مطابق با اندازه گیری های آزمایشی است.
اخبار تازه از Padawan
شبیه سازی پیچیده
سلام
یک آزمایشگاه این کار را با من می کند! زیرا متغیرهای زیادی برای نرم افزار کوچک من ...
خواهیم دید....!
یک آزمایشگاه این کار را با من می کند! زیرا متغیرهای زیادی برای نرم افزار کوچک من ...
خواهیم دید....!
0 x
بازگشت به آینده
رمپ مارپیچی
آزمایش "اسب سرگرمی من"
تو فقط حیرت من را در طی دستاوردهای من درک کردی
اگر همه چیز خوب پیش برود ، من در سطح شیب دار مارپیچ صعودی جدید خود می بینم!
A+
تو فقط حیرت من را در طی دستاوردهای من درک کردی
اگر همه چیز خوب پیش برود ، من در سطح شیب دار مارپیچ صعودی جدید خود می بینم!
A+
0 x
بازگشت به آینده

-
chrisleblay
- من درک می کنم econologic

- پست ها: 134
- سنگ نوشته : 16/06/07, 01:35
- X 4
رویکرد خوب Padawan!
چیزی که من دوست دارم سادگی سیستم شماست. برای من موتور مغناطیسی 100٪ امکان پذیر است اما قالب بندی مدرسه قدرتمند است: برای من از ترمودینامیک برای توصیف پدیده های حرارتی استفاده می شود بنابراین اگر ما بیشتر فشار دهیم سیستم اقتصادی فعلی ......
در تست هایم به اندازه کافی رسیده بودم که قانع شوم و بسیار بسیار عصبانی نیز هستم! :
نظر من: روتور باید از عناصر آهن ساخته شود.
استاتور ثابت باید آهن ربا داشته باشد. ایده من این بود که موتور را "به اندازه کافی" روشن کنم تا از نیروهای "منفی" توسط نیروی شتاب بیشتر شود ، تا این نیروهای منفی را محدود کند من از چوب پنبه موجود در یک بطری شراب استفاده کردم که "میدان مغناطیسی را مسدود می کند". تنها مشکل قدرت زیاد آهن ربا است بنابراین شما باید یک آزمایشگر بسیار ماهر باشید وگرنه یک نرم افزار ساده کامپیوتری با تمام نیروهایی که می توانند آهنرباها را بگویند یا قرار دهند ، تهیه کنید.
برای لحظه ای آن را کنار گذاشتم ، زیرا حتی اگر موفق به انجام آن شوم ، انرژی کافی تولید نخواهد کرد ، به همین دلیل است که ترجیح می دهم ظرف خورشیدی تهیه کنم که اولین قدم به سمت آزادی انرژی باشد. به نظر من موتور مغناطیسی در طی چند سال به لطف بینش افرادی که دوست دارند بسیار محبوب خواهد شد کوارتز برای مثال
A +
کریس
چیزی که من دوست دارم سادگی سیستم شماست. برای من موتور مغناطیسی 100٪ امکان پذیر است اما قالب بندی مدرسه قدرتمند است: برای من از ترمودینامیک برای توصیف پدیده های حرارتی استفاده می شود بنابراین اگر ما بیشتر فشار دهیم سیستم اقتصادی فعلی ......
در تست هایم به اندازه کافی رسیده بودم که قانع شوم و بسیار بسیار عصبانی نیز هستم! :
نظر من: روتور باید از عناصر آهن ساخته شود.
استاتور ثابت باید آهن ربا داشته باشد. ایده من این بود که موتور را "به اندازه کافی" روشن کنم تا از نیروهای "منفی" توسط نیروی شتاب بیشتر شود ، تا این نیروهای منفی را محدود کند من از چوب پنبه موجود در یک بطری شراب استفاده کردم که "میدان مغناطیسی را مسدود می کند". تنها مشکل قدرت زیاد آهن ربا است بنابراین شما باید یک آزمایشگر بسیار ماهر باشید وگرنه یک نرم افزار ساده کامپیوتری با تمام نیروهایی که می توانند آهنرباها را بگویند یا قرار دهند ، تهیه کنید.
برای لحظه ای آن را کنار گذاشتم ، زیرا حتی اگر موفق به انجام آن شوم ، انرژی کافی تولید نخواهد کرد ، به همین دلیل است که ترجیح می دهم ظرف خورشیدی تهیه کنم که اولین قدم به سمت آزادی انرژی باشد. به نظر من موتور مغناطیسی در طی چند سال به لطف بینش افرادی که دوست دارند بسیار محبوب خواهد شد کوارتز برای مثال
A +
کریس
Dernière همتراز نسخه chrisleblay 08 / 02 / 09، 02: 27، 2 بار ویرایش شده است.
0 x
-
فیل
- کارشناس Econologue

- پست ها: 6646
- سنگ نوشته : 28/07/06, 21:25
- محل سکونت: شارلوا مرکز جهان ....
- X 7
اساساً سوالی را که در ابتدا پرسیدم دوباره راه اندازی می کنم: چه اتفاقی می افتد اگر در پایان مسابقه آهنربا ها را دور کنیم تا جاذبه حقوق خود را بازیابد؟ (چه چیزی باعث می شود توپ سقوط کند و دوباره به مدار بازگردد؟
0 x
فیل عالی افتخاری éconologue PCQ ..... من بیش از حد محتاط، نه به اندازه کافی غنی و بیش از حد تنبل واقعا نجات CO2 هستم! http://www.caroloo.be
سلام به همه،
اگر آهن ربا های پایان دوره را برداریم ، توپ کمتر جذب می شود و کمی زودتر از آن متوقف می شود ، فکر می کنم Padawan برعکس نمی گوید یا من دیگر چیزی در مورد آهن ربا نمی فهمم
در هر صورت ویدئوی بسیار خوب ، کار زیادی در پشت همه اینها وجود دارد ، تا این که فیلم در حال افزایش مارپیچ باشد
اگر آهن ربا های پایان دوره را برداریم ، توپ کمتر جذب می شود و کمی زودتر از آن متوقف می شود ، فکر می کنم Padawan برعکس نمی گوید یا من دیگر چیزی در مورد آهن ربا نمی فهمم
در هر صورت ویدئوی بسیار خوب ، کار زیادی در پشت همه اینها وجود دارد ، تا این که فیلم در حال افزایش مارپیچ باشد
0 x
راز گشودن سیستم است
بارک الله
آفرین برای بصیرت شما!
در واقع یک نفر از من کار می کند تا رمپ من و شتاب دهنده با کمال کار کنند زیرا من بیش از حد به نرم افزار simul و "crac" اعتماد کردم و می فهمم وقتی آزمایش می کنم واقعیت ندارد؟ ؟؟؟
بله به لطف پیکربندی دقیق دقیق (با + یا - 1 میلی متر دقت) می توان سرعت را با آهن ربا دائمی تغییر داد ، بله بسیار دقیق است! مگه نه !
در مورد بستن رمپ منتظر بمانید تا رمپ مارپیچی و اندازه گیری های من روی "فلش آهنربا فلش" را ببینید
من چیزی را برای شما توضیح خواهم داد که محققان قدیمی با دیدن سطح شیب دار من با من کردند .... بسیار جالب است !!! ولی
صبر A +
این مواد همه توانایی آنها را نشان نداده است! ج تمام آنچه می توانم بگویم!
برای شما خوب است
در واقع یک نفر از من کار می کند تا رمپ من و شتاب دهنده با کمال کار کنند زیرا من بیش از حد به نرم افزار simul و "crac" اعتماد کردم و می فهمم وقتی آزمایش می کنم واقعیت ندارد؟ ؟؟؟
بله به لطف پیکربندی دقیق دقیق (با + یا - 1 میلی متر دقت) می توان سرعت را با آهن ربا دائمی تغییر داد ، بله بسیار دقیق است! مگه نه !
در مورد بستن رمپ منتظر بمانید تا رمپ مارپیچی و اندازه گیری های من روی "فلش آهنربا فلش" را ببینید
من چیزی را برای شما توضیح خواهم داد که محققان قدیمی با دیدن سطح شیب دار من با من کردند .... بسیار جالب است !!! ولی
صبر A +
این مواد همه توانایی آنها را نشان نداده است! ج تمام آنچه می توانم بگویم!
برای شما خوب است
0 x
بازگشت به آینده
شب بخیر شرکت
همانطور که مواد را داشتم ، دوباره تجربه کردم Padawan، الهام گرفتن از عناصر مدل خود.
بین دو فلنج از دیسک های سخت قرار گرفته ، 2 آهن ربا (سیلندر 14-10 / N10) به صورت مارپیچ (38 میلی متر در دور) در 9/7 محیط قرار گرفته اند.
توپی (Sphere 15 / N38 / 14grammes) نیز یک نئو است که در لبه فلنج گردش می کند.
آرایش آهن ربا کامل نیست ، به دلیل عدم دقت مارپیچ ، 10 سوراخ موجود در یک چوب پوسیده است.
بدون سرعت ، توپ به دلیل فضای آزاد 4 میلی متر بین سیلندر ، دارای یک شکاف ناچیز است.
قرار دادن آهن ربا های اضافی روی مسابقه آخر خیلی کمک نمی کند ، توپ هنوز روی آخری متوقف می شود ...

بدون شوخی ، با 2 یا 4 آهنربا اضافی ، توپ حتی قبل از آنها متوقف می شود.
خوب ، هیچ چیز جدیدی وجود ندارد.
-----
همانطور که نمی توانم فیلمبرداری کنم ، خصوصیات را توصیف می کنم:
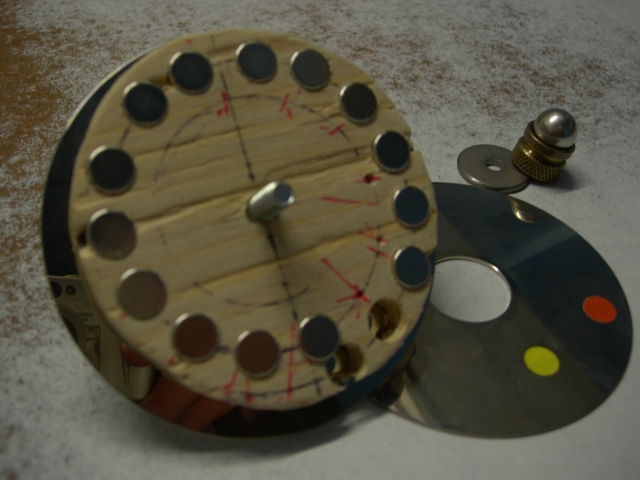
ما 14 آهن ربا مارپیچی را می بینیم که در یک تکه چوب محصور شده اند.

موقعیت D و توپ را در ساعت 4 ، جایی که توپ به خودی خود بالا می رود ، بدون مکش قبلی محدود کنید.
برچسب زرد (D) = موقعیت آهنربا شروع (نزدیکترین به مرکز دیسک)
برچسب قرمز (A) = موقعیت آهنربای انتهایی سطح شیب دار (فاصله 8 میلی متر از مرکز نسبت به زرد).
دیسک مغناطیسی در حالت عمودی. جهت چرخش در جهت عقربه های ساعت.
اگر توپ را مستقیماً بالای D قرار دهم ، تا ساعت 4 ، آن را به A می رساند.
با این حال ، D در ساعت 6 (پایین ترین نقطه) توپ دور خواهد زد ، فقط اگر من آن را قبل از D قرار دهم ، اجازه دهید مکیده شود.
در این حالت ایده آل: مکش توپ قبل از نقطه D واقع در ساعت 6 + توپ به لطف رمپ هنوز از راه دور به خودی خود بالا می رود + با سرعت معینی از 12 ساعت فراتر می رود (که البته کند می شود) ، اما انرژی جمع شده از گرانش + به لطف رمپ نزدیکتر و انرژی جمع شده با شتاب پایین می آید.
خوب ، حتی در این حالت ، در نقطه ورود A (واقع در 4 صبح) آویزان است.
بدون فراتر رفتن از آن ، حلقه را دوباره شروع کنید ...
 بنابراین این "smot" ، با یک سطح شیب دار پیشرونده با آهنرباهای یکسان ، با کمک مکش مغناطیسی ، انرژی چرخش ، گرانش ، نمی تواند از آخرین آهنربا رمپ فراتر رود.
بنابراین این "smot" ، با یک سطح شیب دار پیشرونده با آهنرباهای یکسان ، با کمک مکش مغناطیسی ، انرژی چرخش ، گرانش ، نمی تواند از آخرین آهنربا رمپ فراتر رود.
برای تحقق یافتن ، چیزی وجود دارد که در آهنگ گفته نشده است ...

---
PS: در موقعیت افقی ، با دادن ضربه ای محکم به توپ ، در حد خارج ، 2 تا 3 دور می زند و در جهت خلاف جهت عقربه های ساعت (در کاهش سطح شیب دار) راحت تر می شود
همانطور که مواد را داشتم ، دوباره تجربه کردم Padawan، الهام گرفتن از عناصر مدل خود.
بین دو فلنج از دیسک های سخت قرار گرفته ، 2 آهن ربا (سیلندر 14-10 / N10) به صورت مارپیچ (38 میلی متر در دور) در 9/7 محیط قرار گرفته اند.
توپی (Sphere 15 / N38 / 14grammes) نیز یک نئو است که در لبه فلنج گردش می کند.
آرایش آهن ربا کامل نیست ، به دلیل عدم دقت مارپیچ ، 10 سوراخ موجود در یک چوب پوسیده است.
بدون سرعت ، توپ به دلیل فضای آزاد 4 میلی متر بین سیلندر ، دارای یک شکاف ناچیز است.
قرار دادن آهن ربا های اضافی روی مسابقه آخر خیلی کمک نمی کند ، توپ هنوز روی آخری متوقف می شود ...
بدون شوخی ، با 2 یا 4 آهنربا اضافی ، توپ حتی قبل از آنها متوقف می شود.
خوب ، هیچ چیز جدیدی وجود ندارد.
-----
همانطور که نمی توانم فیلمبرداری کنم ، خصوصیات را توصیف می کنم:
ما 14 آهن ربا مارپیچی را می بینیم که در یک تکه چوب محصور شده اند.
موقعیت D و توپ را در ساعت 4 ، جایی که توپ به خودی خود بالا می رود ، بدون مکش قبلی محدود کنید.
برچسب زرد (D) = موقعیت آهنربا شروع (نزدیکترین به مرکز دیسک)
برچسب قرمز (A) = موقعیت آهنربای انتهایی سطح شیب دار (فاصله 8 میلی متر از مرکز نسبت به زرد).
دیسک مغناطیسی در حالت عمودی. جهت چرخش در جهت عقربه های ساعت.
اگر توپ را مستقیماً بالای D قرار دهم ، تا ساعت 4 ، آن را به A می رساند.
با این حال ، D در ساعت 6 (پایین ترین نقطه) توپ دور خواهد زد ، فقط اگر من آن را قبل از D قرار دهم ، اجازه دهید مکیده شود.
در این حالت ایده آل: مکش توپ قبل از نقطه D واقع در ساعت 6 + توپ به لطف رمپ هنوز از راه دور به خودی خود بالا می رود + با سرعت معینی از 12 ساعت فراتر می رود (که البته کند می شود) ، اما انرژی جمع شده از گرانش + به لطف رمپ نزدیکتر و انرژی جمع شده با شتاب پایین می آید.
خوب ، حتی در این حالت ، در نقطه ورود A (واقع در 4 صبح) آویزان است.
بدون فراتر رفتن از آن ، حلقه را دوباره شروع کنید ...
برای تحقق یافتن ، چیزی وجود دارد که در آهنگ گفته نشده است ...
---
PS: در موقعیت افقی ، با دادن ضربه ای محکم به توپ ، در حد خارج ، 2 تا 3 دور می زند و در جهت خلاف جهت عقربه های ساعت (در کاهش سطح شیب دار) راحت تر می شود
0 x
-
- موضوعات مشابه
- پاسخ ها
- نمایش ها
- آخرین پست
-
- 0 پاسخ ها
- 550 نمایش ها
-
آخرین پست تعادل sicetaitsimple
نمایش آخرین ارسال
21/01/24, 16:49یک موضوع ارسال شده در forum : نوآوری ، اختراع ، حق ثبت اختراع و ایده هایی برای توسعه پایدار
-
- 6 پاسخ ها
- 1039 نمایش ها
-
آخرین پست تعادل کریستف
نمایش آخرین ارسال
29/11/22, 13:47یک موضوع ارسال شده در forum : نوآوری ، اختراع ، حق ثبت اختراع و ایده هایی برای توسعه پایدار
-
- 10 پاسخ ها
- 1456 نمایش ها
-
آخرین پست تعادل کریستف
نمایش آخرین ارسال
26/11/22, 00:13یک موضوع ارسال شده در forum : نوآوری ، اختراع ، حق ثبت اختراع و ایده هایی برای توسعه پایدار
-
- 1 پاسخ ها
- 1499 نمایش ها
-
آخرین پست تعادل izentrop
نمایش آخرین ارسال
08/04/22, 10:54یک موضوع ارسال شده در forum : نوآوری ، اختراع ، حق ثبت اختراع و ایده هایی برای توسعه پایدار
-
- 0 پاسخ ها
- 5760 نمایش ها
-
آخرین پست تعادل دیده شده
نمایش آخرین ارسال
24/11/21, 13:57یک موضوع ارسال شده در forum : نوآوری ، اختراع ، حق ثبت اختراع و ایده هایی برای توسعه پایدار
بازگشت به "نوآوری ها ، اختراعات ، حق ثبت اختراع و ایده های توسعه پایدار"
چه کسی آنلاین است؟
کاربران در حال دیدن این forum : بدون ثبت نام و مهمانان 83